Loading... # 图 ## 定义 G=(V, E) V:顶点的有穷非空集合 V(G)为图G的顶点集合 E:V中顶点偶对(边)的有穷集合 E(G)为图G的边集合 E(G)为空时,图G只有顶点而没有边 ### 无向图 顶点对(x,y)和(y,x)是同一条边,每条边都是无方向的 ### 有向图 顶点对<x,y>是有序的,称为从顶点x到顶点y的一条有向边,每条边都是有方向的 ## 基本术语 * 完全图:任意两个点都有一条边相连,分为无向n\*(n-1)/2条边,和有向n\*(n-1)条边 * 子图:G=(V, E),G'=(V', E'),V'包含于V,E'包含于E',则称G'为G的子图 * 稀疏图:有很少的边或弧的图 * 稠密图:和稀疏图相反 * 权:图上每条边可以带上数值,表示从一个顶点到另一个的距离或耗费等 * 网:边/弧带权的图 * 邻接点:对无向图,(v, v')属于E,则称顶点v和v'互为邻接点,即它俩相邻接,边(v, v')依附于俩顶点,或说边(v, v')与俩顶点相关联 * **顶点的度**:与该顶点相关联的边的数目,记为TD(v) 有向图中,顶点的度等于入度与出度的和 * 入度:以v为终点的有向边的条数,记为ID(v) * 出度:以v为始点的有向边的条数,记为OD(v) * 路径:连续的边构成的顶点序列 * 路径长度:路径上边或弧的数目/权值之和 * 回路(环):第一个顶点和最后一个顶点相同的路径 * 简单路径:序列中顶点均不相同的路径 * 简单回路(简单环):除路径起点和终点相同外,其余顶点均不相同的路径 * **连通图**:无向图中任意两个顶点连通(有路径),则称G为连通图,否则为非连通图 * 连通分量:无向图中的极大连通子图 * 强连通图:有向图(无向图)任意两个顶点间都存在路径 * 强连通分量:有向图中的极大连通子图 * 极小连通子图:G的连通子图,在该子图中删除任何一条边,子图不再连通 * **连通图的生成树**:包含无向图G的所有顶点的极小连通子图 * 有向树:有一个顶点的入度为0,其余顶点的入度均为1的有向图 * 生成森林:若干有向树组成,包含图中全部顶点 ## 图的存储结构 ### 顺序存储结构 #### 邻接矩阵(数组表示法) 建立顶点表(记录各个顶点信息)和一个邻接矩阵(表示各个顶点间关系) A.Edge\[i]\[j]=1, 若\<i, j>属于E或(i, j)属于E ##### 无向图 * 无向图的邻接矩阵是对称的 * 顶点i的度=第i行(列)中1的个数 * 完全图中除主对角线为0,其余均为1 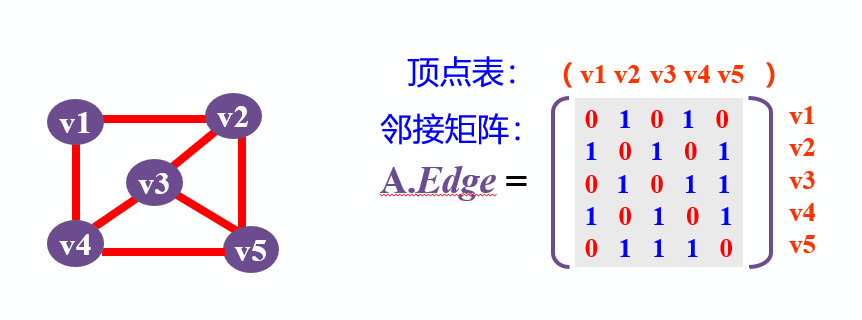 ##### 有向图 * 第i行:以结点v~i~为出度的有向边 * 第i列:以结点v~i~为入度的有向边 * 顶点的出度等于第i行元素之和 * 顶点的入度等于第i列元素之和  ##### 网(有权图) 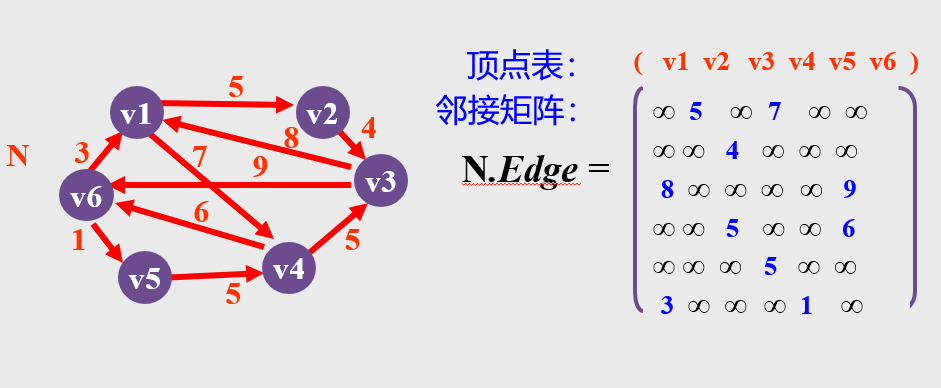 ##### 算法描述 创建无向网 * 输入总顶点数和总边数 * 依次输入点的信息存入顶点表中 * 初始化邻接矩阵,是每个权值初始化为极大值 * 构造邻接矩阵 ~~~C Status CreateUDN(AMGraph &G){ //采用邻接矩阵表示法,创建无向网G cin>>G.vexnum>>G.arcnum; //输入总顶点数,总边数 for(i = 0; i<G.vexnum; ++i) cin>>G.vexs[i]; //依次输入点的信息 for(i = 0; i<G.vexnum;++i) //初始化邻接矩阵,边的权值均置为极大值 for(j = 0; j<G.vexnum;++j) G.arcs[i][j] = MaxInt; for(k = 0; k<G.arcnum;++k){ //构造邻接矩阵 cin>>v1>>v2>>w; //输入一条边依附的顶点及权值 i = LocateVex(G, v1); j = LocateVex(G, v2); //确定v1和v2在G中的位置 G.arcs[i][j] = w; //边<v1, v2>的权值置为w G.arcs[j][i] = G.arcs[i][j]; //置<v1, v2>的对称边<v2, v1>的权值为w }//for return OK; }//CreateUDN ~~~ ##### 优点 * 便于判断两个顶点间是否有边 * 便于计算各个顶点的度 ##### 缺点 * 不便于增加和删除顶点 * 不便于统计边的数目,需要扫描邻接矩阵所有元素才能统计完毕,时间复杂度为O(n^2^) * 空间复杂度高,对稀疏图来说浪费空间 ### 链式存储结构 #### 邻接表(链式)表示法 对每个顶点v~i~都建立一个单链表,把所有与v~i~关联的边的信息链接起来,每个结点设置三个域 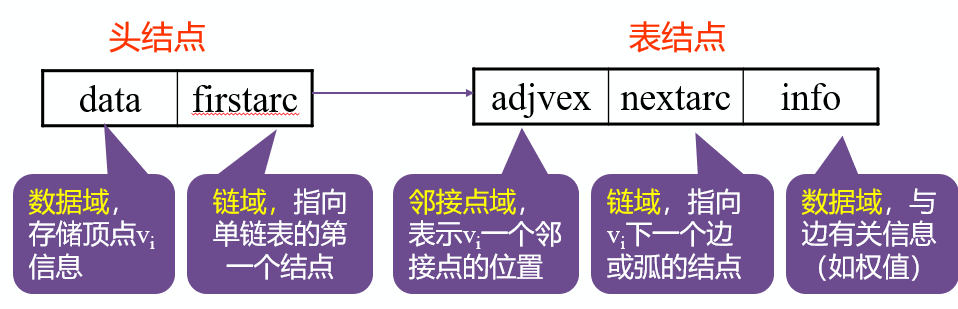 设图为n个顶点,e条边结点 ##### 无向图 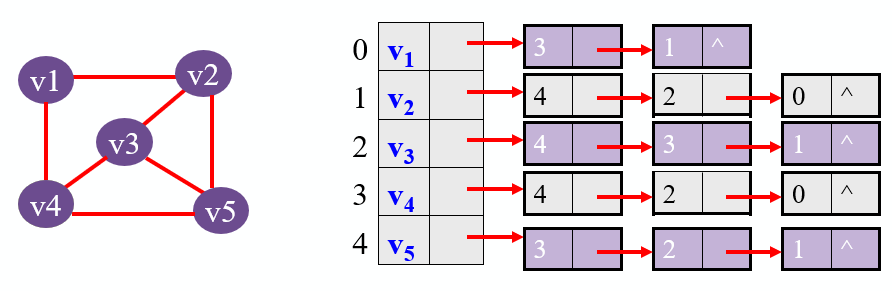 **注意**:里面的数字表示的是数组下标 邻接表不唯一,各个边结点链入顺序不一样 **空间效率O(n+2e)**,比邻接矩阵节省空间 ##### 有向图 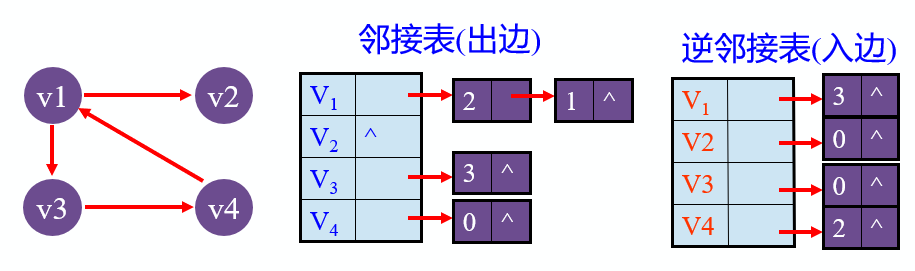 **空间效率O(n+e)** ##### 邻接表存储表示 ~~~C #define MVNum 100 //最大顶点数 typedef struct ArcNode{ //边结点 int adjvex; //该边所指向的顶点的位置 struct ArcNode * nextarc; //指向下一条边的指针 OtherInfo info; //和边相关的信息 }ArcNode; typedef struct VNode{ VerTexType data; //顶点信息 ArcNode * firstarc; //指向第一条依附该顶点的边的指针 }VNode, AdjList[MVNum]; //AdjList表示邻接表类型 typedef struct{ AdjList vertices; //邻接表 int vexnum, arcnum; //图的当前顶点数和边数 }ALGraph; ~~~ 创建无向网 * 输入总顶点数和总边数 * 依次输入点的信息存入顶点表中 ,是每个表头结点的指针域初始化为NULL * 创建邻接表 ~~~C Status CreateUDG(ALGraph &G){ //采用邻接表表示法,创建无向图G cin>>G.vexnum>>G.arcnum; //输入总顶点数,总边数 for(i = 0; i<G.vexnum; ++i){ //输入各点,构造表头结点表 cin>> G.vertices[i].data; //输入顶点值 G.vertices[i].firstarc=NULL; //初始化表头结点的指针域为NULL } for(k = 0; k<G.arcnum;++k){ //输入各边,构造邻接表 cin>>v1>>v2; //输入一条边依附的两个顶点 i = LocateVex(G, v1); j = LocateVex(G, v2); p1=new ArcNode; //生成一个新的边结点*p1 p1->adjvex=j; //邻接点序号为j p1->nextarc= G.vertices[i].firstarc; G.vertices[i].firstarc=p1; //将新结点*p1插入顶点vi的边表头部 p2=new ArcNode; //生成另一个对称的新的边结点*p2 p2->adjvex=i; //邻接点序号为i p2->nextarc= G.vertices[j].firstarc; G.vertices[j].firstarc=p2; //将新结点*p2插入顶点vj的边表头部 } return OK; }//CreateUDG ~~~ ##### 优点 * 便于增加和删除结点 * 便于统计边的数目,按顶点表顺序扫描所有边表可得到边的数目 * 空间效率高 ##### 缺点 * 不便于判断顶点间是否有边 * 不便于计算有向图各个顶点的度 **邻接矩阵多用于稠密图,邻接表多用于稀疏图** #### 十字链表 有向图的另一种链式存储结构,可以看成是将有向图的邻接表和逆邻接表结合起来的一种链表 ##### 有向图 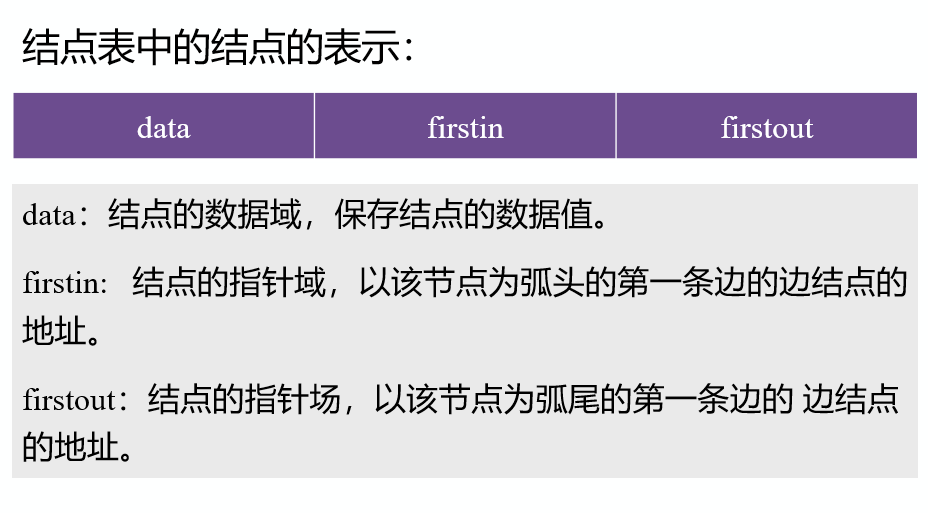 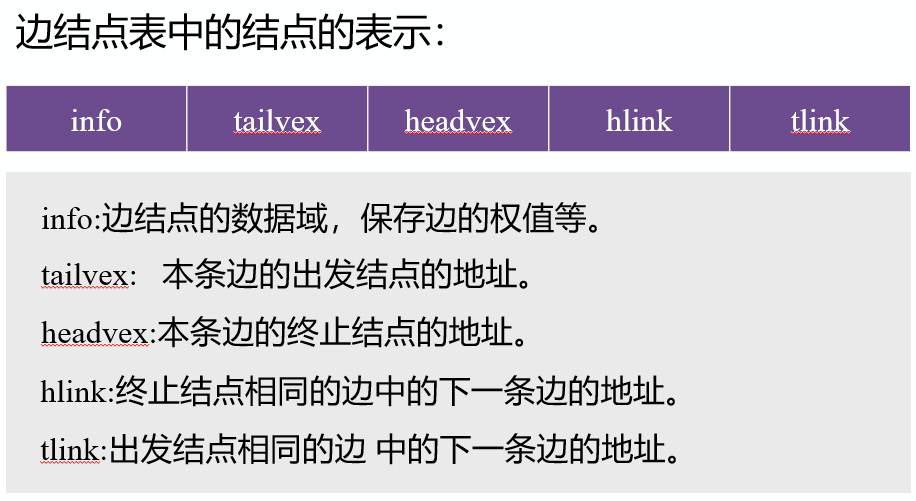 ##### 无向图 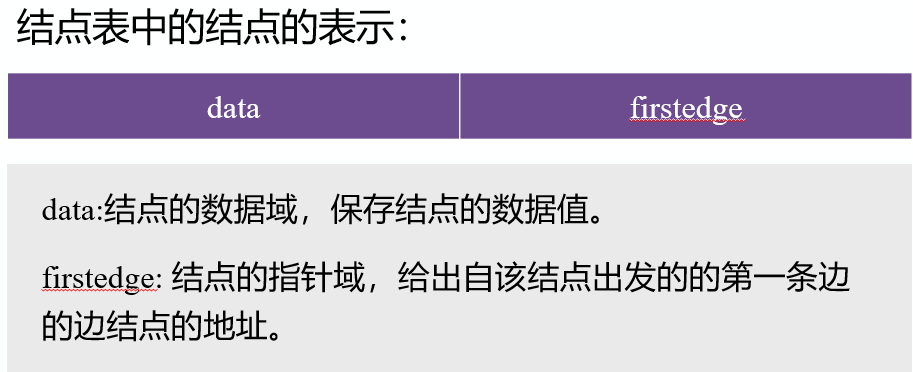 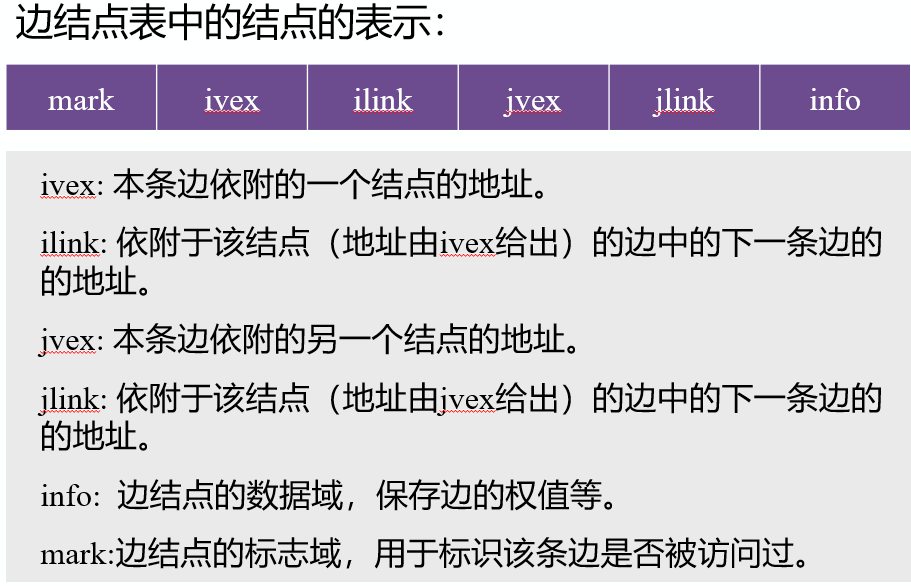 ## 图的遍历 ### 深度优先(DFS) 步骤 * 访问起始点v * 若v的第一个邻接点没访问过,深度遍历此邻接点w~1~ * 再重w~1~出发,访问与w~1~邻接但还未访问的顶点w~2~ * 再从w~2~出发,进行类似的访问…… * 直到所有邻接顶点都被访问过为止 中间如果没有其他没有被访问过的邻接顶点,就退回一步进行搜索,并重复 #### 邻接矩阵 递归 ~~~C void DFS(AMGraph G, int v){ //图G为邻接矩阵类型 cout<<v; visited[v] = true; //访问第v个顶点 for(w = 0; w< G.vexnum; w++) //依次检查邻接矩阵v所在的行 if((G.arcs[v][w]!=0)&& (!visited[w])) DFS(G, w); //w是v的邻接点,如果w未访问,则递归调用DFS } ~~~ #### 邻接表 递归 ~~~C void DFS(ALGraph G, int v){ //图G为邻接表类型 cout<<v; visited[v] = true; //访问第v个顶点 p= G.vertices[v].firstarc; //p指向v的边链表的第一个边结点 while(p!=NULL){ //边结点非空 w=p->adjvex; //表示w是v的邻接点 if(!visited[w]) DFS(G, w); //如果w未访问,则递归调用DFS p=p->nextarc; //p指向下一个边结点 } } ~~~ ### 广度优先 分层搜索,不是递归 步骤 * 访问起始点v后,依次访问v的邻接点,访问过的置visited[v]为true,并将v入队 * 然后依次访问这些顶点中未被访问过的邻接点 * 直到所有顶点都被访问过(即队空)为止 ~~~C void BFS (Graph G, int v){ //按广度优先非递归遍历连通图G cout<<v; visited[v] = true; //访问第v个顶点 InitQueue(Q); //辅助队列Q初始化,置空 EnQueue(Q, v); //v进队 while(!QueueEmpty(Q)){ //队列非空 DeQueue(Q, u); //队头元素出队并置为u for(w = FirstAdjVex(G, u); w>=0; w = NextAdjVex(G, u, w)) if(!visited[w]){ //w为u的尚未访问的邻接顶点 cout<<w; visited[w] = true; EnQueue(Q, w); //w进队 }//if }//while }//BFS ~~~ ### DFS和BFS比较 * 空间复杂度相同,O(n) * 时间复杂度于存储结构相关(是邻接矩阵还是邻接表)与搜索路径无关 ## 图的应用 ### 最小生成树 * 使用不同的遍历图方法,可以得到不同的生成树 * 从不同顶点出发,也能得到不同生成树 * 按照生成树的定义,n个顶点的连通网络的生成树有n个顶点、n-1条边 最小生成树目标:寻找各边权值之和最小的生成树 #### Prim算法 归并顶点,与边数无关,适于稠密网 * 从某顶点起,选择与它关联的最小权值的边,将其顶点加入到生成树的顶点集合 * 每一个顶点都如此,选择没有选过且具有最小权值的边 * 直到所有顶点都加入生成树的顶点集合 #### Kruskel算法 归并边,适于稀疏网 * 构造n个顶点的非连通图 * 选取其中权值最小边,两个顶点相连 * 重复直到所有顶点在同一连通分量上为止 ### 最短路径 与最小生成树区别是不用包含全部n个顶点 #### 单源最短路径 一顶点到其他顶点最短距离 * 初始化:先找出从源点v~0~到各终点v~k~的直达路径(v~0~, v~k~) * 选择:从这些路径中找出一条长度最短的路径(v~0~, u) ``` if (v ``` ~0~, u) + (u, v~k~) < (v~0~, v~k~) ``` (v ``` ~0~, u, v~k~)代替(v~0~, v~k~) * 更新:对其余各条路径进行调整 #### 所有顶点间最短路径 任意两顶点间 ### 拓扑排序 ### 关键路径 最后修改:2021 年 11 月 22 日 © 允许规范转载 打赏 赞赏作者 支付宝微信 赞 如果觉得我的文章对你有用,请随意赞赏
